CAN FD总线介绍



#1 长度增加
CAN FD 支持每个数据帧最多64 个数据字节,而传统 CAN 仅支持 8 个数据字节。这减少了协议开销并提高了协议效率

#2 速度提高
CAN FD 支持双比特率:与传统 CAN 一样,标称(仲裁)比特率限制为 1 Mbit/s,而数据比特率则取决于网络拓扑/收发器。实际上,可以实现高达 5 Mbit/s 的数据比特率

#3 更好的可靠性
CAN FD 使用改进的循环冗余校验 (CRC) 和“受保护的填充位计数器”,从而降低未检测到错误的风险。这对于车辆和工业自动化等安全关键型应用至关重要

#4 平滑过渡
CAN FD 和经典 CAN only ECU在某些条件下可以混合使用。这样可以逐步引入 CAN FD 节点,从而大大降低 OEM 的成本和复杂性

CAN FD 协议引入了调整后的 CAN 数据帧,以实现额外的数据字节和灵活的比特率。
下面我们比较 11 位经典 CAN 帧与 11 位 CAN FD 帧(也支持 29 位):
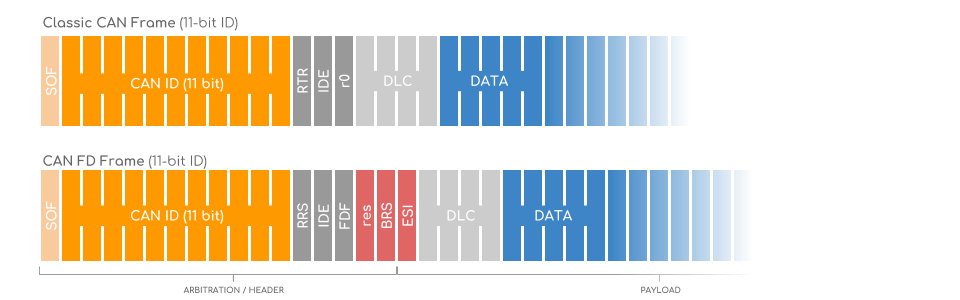
下面我们逐步分析一下差异:
RTR 与 RRS:传统 CAN 中使用远程传输请求 (RTR) 来识别数据帧和相应的远程帧。在 CAN FD 中,根本不支持远程帧 – 远程请求替换 (RRS) 始终占主导地位 (0)。
r0 与 FDF:在经典 CAN 中,r0 是保留且占主导地位的 (0)。在CAN FD中,它被命名为FDF和隐性(1)。
在r0/FDF位之后,CAN FD协议添加了“3个新位”。请注意,不支持 CAN FD 的节点会在 FDF 位后生成错误帧。
res:这个新的保留位与 r0 起着相同的作用 – 即它将来可能被设置为隐性(1)以表示新协议。
BRS:比特率开关(BRS) 可以占主导地位(0),这意味着CAN FD 数据帧以仲裁速率(即最大1 Mbit/s)发送。将其设置为隐性 (1) 意味着数据帧的剩余部分以更高的比特率(高达5 Mbit/s)发送。
ESI:错误状态指示符(ESI) 位默认为显性位(0),即“错误活动”。如果发送器变为“错误被动”,它将呈隐性 (1),表明其处于错误被动模式。

DLC:与经典 CAN 一样,CAN FD DLC 为 4 位,表示帧中的数据字节数。上表显示了两种协议如何一致地使用最多 8 个数据字节的 DLC。为了维持 4 位 DLC,CAN FD 使用 9 到 15 之间的其余 7 个值来表示使用的数据字节数(12、16、20、24、32、48、64)。
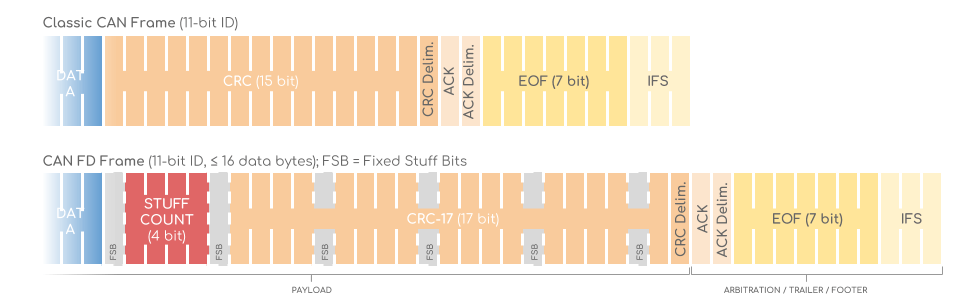
SBC:填充位计数(SBC)位于 CRC 之前,由 3 个格雷编码位和一个奇偶校验位组成。下面的固定填充位可以被视为第二奇偶校验位。添加SBC是为了提高通信可靠性。
CRC:循环冗余校验 (CRC) 在经典 CAN 中为 15 位,而在 CAN FD 中为 17 位(最多 16 个数据字节)或 21 位(针对 20-64 个数据字节)。在经典CAN中,CRC中可以有0到3个填充位,而在CAN FD中总是有4个固定填充位以提高通信可靠性。
ACK: CAN FD 数据帧的数据阶段(也称为有效负载)在 ACK 位处停止,这也标志着潜在增加的比特率的结束。
显然,与传统 CAN 相比,CAN FD 的附加功能增加了许多额外的位 – 这如何能减少开销?
答案是不会 – 请参阅以下 3 个数据字节的经典 CAN 与 CAN FD 的可视化结果。事实上,直到跨越8个数据字节时,CAN FD的效率才超过经典CAN。然而,通过转向 64 个数据字节,效率可以从 ~50% 提高到 ~90%(更多信息见下文)。
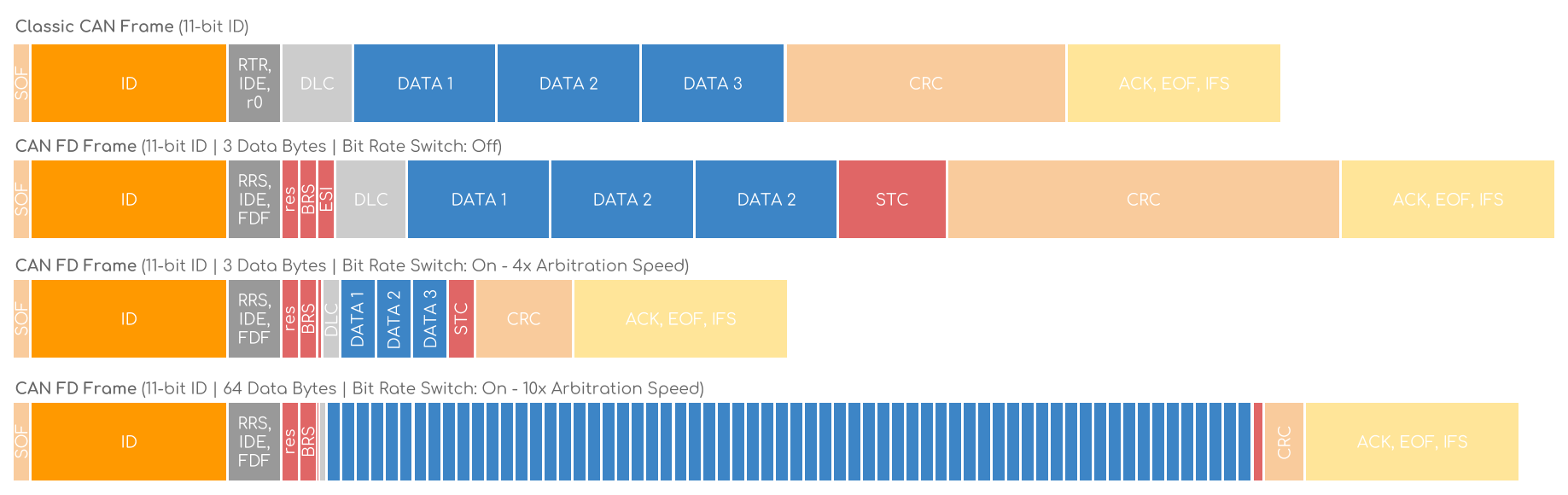
极品速度:开启比特率切换
如前所述,以常规速度发送 64 个数据字节会阻塞 CAN 总线,从而降低实时性能。
为了解决这个问题,可以启用比特率切换,以允许以高于仲裁速率的速率发送有效负载(例如,5 Mbit/s 与 1 Mbit/s)。上面我们直观地展示了 3 个数据字节和 64 个数据字节场景的效果。
请注意,较高的速度适用于以 BRS 位开始并以 CRC 定界符结束的数据帧部分。
此外,当今大多数车辆使用 0.25-0.5 Mbit/s,这意味着使用 5 Mbit/s CAN FD 将使有效负载传输速度提高 10 倍。

电动车
电动汽车和混合动力汽车使用新的动力系统概念,需要更高的比特率。与 DC/DC 逆变器、电池、充电器、增程器等相关的新控制单元增加了复杂性。预计到 2025 年,所需的比特率将超过 CAN - 随着电动汽车的爆炸性增长,这可能是CAN FD 推出的重要因素

ECU闪烁
车辆软件变得越来越复杂。因此,今天通过 OBD2 端口执行 ECU 更新可能需要几个小时。借助 CAN FD,此类过程的速度可以提高 4 倍以上。该用例一直是汽车 OEM 厂商对 CAN FD 需求背后的原始驱动因素之一

机器人技术
一些应用程序依赖于时间同步行为 - 例如具有多个轴的机器人手臂。此类设备通常使用CANopen,并要求每个控制器同步发送多个 CAN 帧 (PDO)(不会因较高优先级帧而中断)。通过转向 CAN FD,可以在单帧中发送数据以提高效率

ADAS 与安全驾驶
高级驾驶辅助系统 (ADAS) 越来越多地被引入乘用车和商用车中。这给传统 CAN 的总线负载带来了压力,但 ADAS 是提高安全性的关键。在这里,CAN FD 将成为在不久的将来增强安全驾驶的关键
卡车和公共汽车
卡车和公共汽车使用长 CAN 总线(10-20 米)。因此,它们依赖于较慢的比特率(根据J1939-14为 250 kbit/s 或 500 kbit/s )。在这里,即将推出的 J1939 FD 协议预计将显着改进商用车功能,包括。例如高级驾驶辅助系统

安全 CAN 总线
正如最近的 CAN 黑客攻击所示,传统 CAN 很容易受到攻击。如果黑客获得对 CAN 总线的访问权限(例如通过无线方式),他们就可以关闭关键功能。通过安全板载通信 (SecOC) 模块进行的 CAN FD 身份验证可能是关键的推出驱动因素


CAN/CAN FD接口卡
为PC快速拓展CAN接口,二次开发资源库丰富,质量可靠

CAN/CAN FD总线网关路由器
在CAN总线和其他网络之间转发报文

CAN和CAN FD总线I/O模块
用于控制、记录测量数据、和处理
综合性多功能CAN总线分析软件
监控CAN报文流,支持手动/周期性发送,可用于控制或仿真