博客
1、应用背景
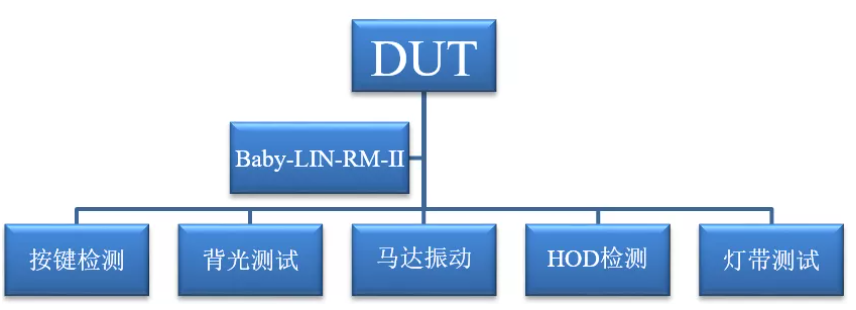
测试LIN型多功能方向盘的按键、背光、马达震动、HOD、灯带功能
2、使用的产品
产品型号:Baby-LIN-RM-II(现在是RM-III)
主要作用:使用Baby-LIN-RM-II作为LIN主节点,控制多功能方向盘的按键、背光、马达震动、HOD、灯带功能。利用Baby-LIN-RM-II的Digital Input和Digital Output进行macro编程,分配好对应脚本与Input和 Output的关系,最终离线运行,通过PLC等上位机通过Input控制对应功能的检测并通过Output给出相应反馈。
3、应用架构图
4、应用方法与过程
硬件按对应方式连接好线路,线路连接如后续图片。
软件上配置脚本SDF文件:主要为根据各功能对应的LIN信号配置相应的脚本程序,如按键信号、背光信号、马达控制信号、HOD触发与检测信号、灯带RGB控制信号。根据这些信号,可以形成对应的信号操作并配置好各Input端触发的映射关系,再根据上位机如PLC给出Input信号,触发各自功能的检测。
5、结果
- 按键:针对该系列不同型号的多功能开关进行测试,根据各开关按键给出的 LIN 信号,利用 RM-II 的 event 输出测试按键是否按下。
- 按键背光:使用 RM-II 的 macro 设置相关背光 LIN 信号,利用 RM-II 的上电启动功能,直接点亮背光。
- 马达震动:针对带马达震动的方向盘,利用 RM-II 的 input 功能,达到开始和停止马达震动的功能。
- HOD:离手检测,针对带 HOD 功能的方向盘,根据离手的 LIN 信号,利用 RM-II 的event 输出测试 HOD 功能。
- 灯带:使用 macro 实现灯带的 CRC 算法及相关 RGB 的设置,利用 RM-II 的 input 控制点亮灯带及显示各种颜色。
6、应用图片