博客
一、CAN技术起源:经典CAN(CAN CC)
CAN技术的出现,源于对实时控制和可靠数据传输技术的深切需求。CAN技术于1986年的汽车工程师协会(SAE)会议上正式发布。随后,博世公司在1991年发布了首个CAN协议规范,标志着CAN技术正式步入规范化、标准化的轨道。
1、技术规格与性能
经典CAN(CAN CC)的最大有效负载为8字节,支持高达1Mbit/s的比特率,满足了当时汽车和工业控制领域的实时通信需求。CAN CC采用了一种非破坏性仲裁的载波侦听多路访问/冲突避免(CSMA/CA)串行通信协议,确保了数据/远程帧冲突的避免,同时不会造成任何时间损失。此外,CAN CC还具备强大的错误检测和处理机制,对电磁干扰具有较强的抗干扰能力,能够自动重传失败帧,确保系统范围内的数据一致性。
2、帧结构与通信协议
CAN CC的帧结构也是其成功的重要因素之一。它支持两种数据帧格式:基本帧格式(CBFF)和扩展帧格式(CEFF)。这两种格式的主要区别在于CAN标识符的长度,CBFF支持11位的CAN标识符,而CEFF则支持29位的CAN标识符。这种设计使得CAN CC能够灵活地应用于不同的网络和通信场景。
3、AUI状态与仲裁机制
在物理层方面,CAN CC的附加单元接口(AUI)提供了“显性”和“隐性”两种可能的状态,这些状态通常对应于逻辑上的“0”和“1”。网络逻辑采用了一种“线与”机制,其中显性位(0)能够覆盖隐性位(1),这一机制在仲裁过程中发挥着至关重要的作用。
CAN CC数据帧由帧起始(SOF)、仲裁段、控制字段、数据字段、CRC字段、ACK字段和帧结束(EOF)等部分组成。其中,仲裁段包含标识符和RTR(远程传输请求)位;控制字段包含DLC(数据长度代码),它决定了帧中发送的数据字节数;数据字段是帧的实际数据有效负载;CRC字段包括CRC序列和CRC定界符,用于确保数据完整性;ACK字段由ACK时隙和分隔符组成,用于确认帧的正确接收。
4、错误处理与同步
在错误处理与同步方面,CAN CC使用活动错误标志和被动错误标志来处理错误。这些错误标志会增加内部错误计数器,可能导致有缺陷的节点进入错误被动状态,最终进入总线关闭状态。为了保持数据的完整性,CAN CC还采用了位填充机制,在五个相同值的连续位之后,发送器会插入一个相反值的位。
二、CAN技术迭代:CAN FD的出现
CAN技术的进步带来了CAN FD(CAN with Flexible Data-Rate),这是对经典CAN(CAN CC)的重要扩展。CAN FD支持的比特率可达8 Mbit/s,并且能够处理高达64字节的有效负载,同时保持与CAN CC帧的完全向后兼容性。这种新格式通过FDF(灵活的数据格式)位来区分,这是在CAN CC中保留的位。
1、基本帧格式
CAN FD的基本帧格式在顺序和数量上与CAN CC保持一致,但对某些字段的长度进行了调整以适应新特性和增强。这些改进包括:
■ 比特率切换(BRS)位:允许在帧内切换到更高的比特率,使CAN FD能够在同一个帧内传输更多数据,避免网络因大数据包而超载。
■ 错误状态指示(ESI)位:指示发送方是处于主动错误节点还是被动错误节点,改善错误管理。
■ 扩展数据长度代码(DLC):DLC编码的值扩展,以表示更长的数据有效负载,提高数据传输效率。
■ CRC多项式调整:确保不同有效负载大小下的数据完整性,包括17位CRC和21位CRC的应用。
CAN FD帧结构的其余部分与CAN CC相似,允许CAN FD设备连接到相同的物理网络,并使用相同的收发器、连接器和电缆。值得注意的是,CAN FD不支持远程帧。
2、应用与优势
CAN FD的应用范围广泛,特别是在汽车行业,它已经成为许多高级驾驶辅助系统(ADAS)和车联网(V2X)通信的首选技术。CAN FD的优势在于其高速率和大数据量的传输能力,这使得它能够满足现代汽车对于复杂控制和诊断数据的需求。
此外,CAN FD还提供了与现有CAN CC网络的兼容性,这使得在升级和扩展现有系统时更加灵活和方便。
综上所述,CAN FD作为CAN技术的一个重要迭代,其高速率和大数据量的传输能力为现代汽车和其他需要高效数据传输的应用场景提供了有力的支持。
三、CAN技术革新:CAN XL发布
步入2024年,汽车行业迎来了CAN XL(eXtended Length)这一CAN技术的最新进步。CAN XL标志着CAN技术在数据传输能力和网络通信效率上的又一次飞跃。符合ISO 11898:2024标准及CiA 610-1规范(尽管后者已被CiA撤回),CAN XL以其卓越的性能和创新特性,无缝集成于现代汽车网络之中。
CAN XL支持高达2048字节的扩展有效载荷容量,并实现高达20 Mbit/s的比特率,有效弥合了CAN FD和以太网之间的差距。此外,CAN XL通过隧道化和映射整个以太网帧,提高了数据吞吐量而不损耗网络时间。在德国巴登举行的第五届CAN XL研讨会上(由CiA组织),CAN XL已成功通过在真实网络环境中的互操作性测试。
四、CAN XL技术主要特点和改进
CAN XL的控制器保持了向后兼容性,能够处理CAN CC和CAN FD数据帧,确保与现有系统的无缝集成。以下是CAN XL的一些关键特性和改进:
■ 扩展的有效负载和比特率:有效负载高达2048字节,比特率高达20 Mbit/s,满足更高的数据传输要求。
■ 增强型CAN-ID字段:分为11位优先级字段和32位接受字段,提供改进的帧优先级和接受过滤。
■ 协议嵌入配置:引入了新的配置选项,如禁用错误信令和启用PWM编码,以提供更高的比特率。
■ 可靠性提高:使用两个CRC字段,控制段的13位前缀CRC和CRC段的32位帧CRC,增强错误检测和数据完整性。

在CAN XL数据帧结构中,几个关键位扮演着至关重要的角色,不仅决定了帧的类型,还确保了帧的优先级处理效率。其中,优先级标识符是设置CAN XL数据帧优先级的核心,它使得帧能够基于其优先级级别进行高效处理。
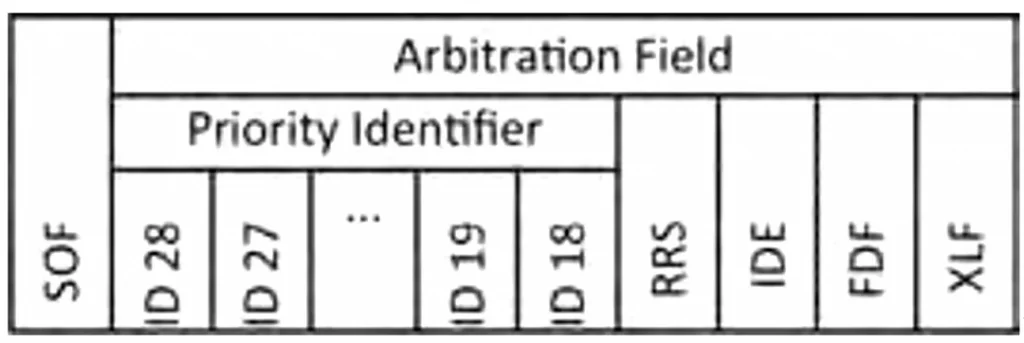
1、RRS位与XLF位的功能
RRS(远程请求替换)位与CAN CC数据帧中的RTR(远程传输请求)位,以及CAN FD数据帧中的RRS位处于相同位置,这一设计确保了不同CAN版本之间的一致性和兼容性。此外,XLF(扩展长度帧)位是区分CAN FD和CAN XL数据帧的重要标志。在CAN XL数据帧中,XLF位始终保持隐性状态,且当XLF位为隐性时,FDF(帧数据字段)位也相应地为隐性。这种配置对于在CAN网络中准确识别CAN XL数据帧至关重要。
2、resXL位与ADS的双重作用
resXL位被专门保留,以备未来协议框架内的扩展使用。ADS(数据序列仲裁)则承担着双重任务:一方面,它将比特率从标称比特率切换到CAN XL数据比特率;另一方面,它负责将CAN收发器模式从仲裁模式转换为数据TX模式或数据RX模式。

ADS由ADH、DH1、DH2和DL1位组成,其中ADH是在XL数据阶段开始前的最后一个标称位时间,以隐性位传输。随后,DH1和DH2位标志着XL数据阶段的开始,同样以隐性传输。比特率的变化恰好在ADH和DH1之间发生,而接收器同步则发生在从XLF位到前面的resXL位,以及从DH1和DH2位到DL1位的转换过程中。
3、SDT、SEC、DLC和SBC的详细说明
SDT(服务数据单元类型)是一个8位值,它源自LLC(逻辑链路控制)帧,而SEC(简单扩展内容)位也同样来自LLC帧。DLC(数据长度代码)跨越11位,其范围从0到2047,与1字节到2048字节之间的数据长度相对应。SBC(数据位计数)是一个3位的值,表示仲裁字段中动态填充位的数量,其范围从0到3(采用格雷编码)。
PCRC(前缀循环冗余校验)序列源自循环冗余校验(CRC),它是对包含仲裁字段、SDT、SEC位、DLC和SBC的位流进行计算得出的。值得注意的是,动态填充位(包括FDF位之前的三个位)被纳入PCRC的计算中,而静态位(如SOF、IDE、FDF、XLF、resXL、ADS和固定填充位等)则被排除在外。
4、VCID和AF的传递
VCID(虚拟CAN网络ID)是一个8位值,而AF(接受字段)是一个32位值,它们都从LLC帧传递而来。
5、CRC字段的计算

CRC字段则包含了帧CRC序列和FCP(格式检查模式)。CRC计算的相关位流由仲裁字段、控制字段和数据字段组成的位流构成,排除了与PCRC相同的静态位,在CRC计算中不包括动态位和固定填充位。
6、ACK字段的功能
ACK字段则包括DAS(数据到仲裁序列)、ACK插槽和ACK分隔符。其中,DAH、AH1、AH2、ACK槽和ACK分隔符位均为隐性,而AL1位则为显性。
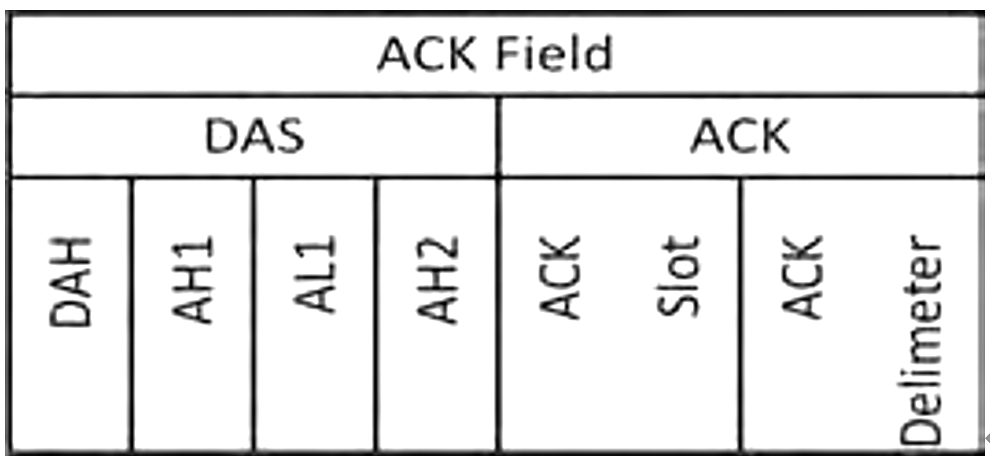
DAS同样具有双重作用:它不仅能将比特率从XL数据比特率切换回标称比特率,还能在ADS中进行模式转换时,将CAN收发器模式从数据TX模式或数据RX模式转换回仲裁模式。DAS由DAH、AH1、AL1和AH2位组成,其中DAH是在标称比特时间之后的初始比特位,它以XL数据比特率表示XL数据阶段的结束。
结语
本文回顾了CAN技术的历史,从20世纪80年代的起源开始,CAN技术一直处于创新的前沿。CAN XL的应用范围已超出传统汽车和非汽车工程的可能性,提供了一系列超越传统界限的应用。了解CAN的历史,我们见证了CAN技术的演变和持续的技术创新。随着技术的发展,我们期待CAN XL进一步拓展CAN技术的应用范围,满足未来汽车行业的需求。
文章来源:本文内容基于Robert Nawrath在《CAN Newsletter 2024》中发表的文章。由虹科智能互联团队精心翻译并传播,旨在与业界同仁共享这一前沿技术成果。
了解更多虹科技术资讯,欢迎前往【虹科智能互联】官方网站:https://www.intelnect.com/category/technical-article/
联系虹科:18138758797