
 继我们在Linux环境下成功推出CAN和CAN FD接口驱动程序之后,现在我们为LIN接口带来了同样兼容Linux的驱动程序。免费软件包中不仅包含了驱动程序本身,还包括了实用工具和一份易于理解的快速入门指南。用户下载后,需要根据当前使用的Linux内核版本进行驱动程序的编译和安装。安装过程完成后,只需将虹科PEAK-System的LIN接口设备连接到计算机,驱动程序便会自动加载并开始工作。当前发布的1.3.0版本,全面兼容虹科PEAK-System的LIN接口设备,包括虹科PLIN-USB、虹科PCAN-USB Pro FD和虹科PCAN-USB Pro。这一更新确保了用户能够享受到广泛的设备兼容性和便捷的使用体验。
继我们在Linux环境下成功推出CAN和CAN FD接口驱动程序之后,现在我们为LIN接口带来了同样兼容Linux的驱动程序。免费软件包中不仅包含了驱动程序本身,还包括了实用工具和一份易于理解的快速入门指南。用户下载后,需要根据当前使用的Linux内核版本进行驱动程序的编译和安装。安装过程完成后,只需将虹科PEAK-System的LIN接口设备连接到计算机,驱动程序便会自动加载并开始工作。当前发布的1.3.0版本,全面兼容虹科PEAK-System的LIN接口设备,包括虹科PLIN-USB、虹科PCAN-USB Pro FD和虹科PCAN-USB Pro。这一更新确保了用户能够享受到广泛的设备兼容性和便捷的使用体验。
一、PLIN驱动安装指导
1、下载驱动
驱动下载链接:https://www.peak-system.com/quick/PLIN-Linux-Driver
2、解压文件
$ tar -xzf peak-lin-driver-x.y.z.tar.gz
3、编译驱动
$ make
4、下载驱动
$ sudo make install
5、加载模块
$ sudo modprobe plin
6、检测驱动安装是否成功
$ ls /sys/class/plin

注:plin0、plin1为PCAN-USB-PRO-FD设备的两个LIN节点
二、Linux环境PLIN的基本使用
在Linux环境下,使用PLIN驱动进行LIN通信的基本操作可以通过以下步骤实现,这里以双通道PLIN进行主从节点的收发测试为例:
1、主节点发
1)设置主节点PLIN0和波特率19200baud
$ lin start master 19200 /dev/plin0
2)设置PLIN0节点发布报文(报文ID:0x22;报文Data:1,2,1,2;校验类型:Classic;帧类型:publisher)
$ linwrite -i=0x22 -b=” 1 2 1 2” -c=C -d=P /dev/plin0
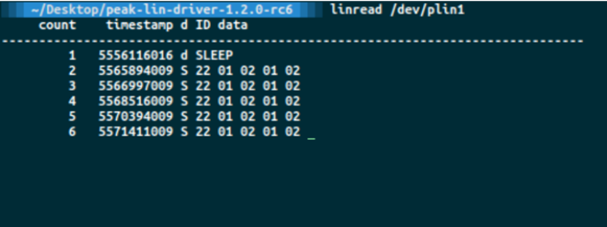
2、从节点收
1)设置从节点PLIN1和波特率19200baud
$ lin start slave 19200 /dev/plin1
2)设置PLIN1节点读取报文(需先打开过滤器)
$ lin set id-filter all-opened /dev/plin1
$ linread /dev/plin1
三、PLIN通道顺序识别
PLIN通道可以存储用户定义的标识符(字符串或数字),因此PLIN通道顺序可以通过存储的标识符来确定。如定义PLIN0通道的字数字标识符”33”:
$ lin set ident-num 33 /dev/plin0
通过分配数字标识符,将创建一个符号链接”/dev/plin33″,指向(在本例中)/dev/plin0。标识符的改变需要重新卸载和加载PLIN驱动模块:
$ sudo rmmod plin
$ sudo modprobe plin
现在,访问/dev/plin33通道将相当于访问/dev/plin0通道。如查看PLIN第一通道的数字标识符:
$ lin get in /dev/plin33
结语
随着PLIN驱动程序的推出,虹科为用户提供了更加完善的Linux环境下的通信解决方案。我们致力于简化开发流程,提升用户体验。如果您对PLIN驱动程序或相关通信技术感兴趣,欢迎访问我们的官方网站获取更多信息。同时,您也可以参考我们之前发布的关于PCAN驱动程序的文章,了解更多关于Linux环境下CAN通信的升级体验。
了解虹科PCAN更多技术资讯,欢迎前往【虹科智能互联】官方网站:https://www.intelnect.com/
联系虹科工程师:https://tl-tx.dustess.com/OHRgtontq3
TEL:18138758797