针对汽车电子控制单元(ECU)的CAN/CAN FD总线老化与可靠性检测解决力广案。覆盖高温、高湿、振动等严苛工况下的总线通信质量监测与故障预判到,确保车规级产品的长期稳定运行。
符合ISO 14229(UDS)协议标准的ECU远程诊断、标定与刷写解决方案。支持多通道并行刷写、安全访问认证及自动化诊断脚本,显著提升售后服务与产线编程效率。
面向汽车零部件制造商的高精度终线(End-of-Line)质量检测与功能验证平台。集成电气参数测量、通信协议验证与功能测试,实现产线高节拍、零缺陷的品控目标。
高速汽车电气信号采集与分析解决方案。覆盖CAN/LIN/FlexRay/Ethernet等车载总线信号的实时捕获、协议解码与质量分析,助力整车电子电气架构的开发验证与故障定位。
面向航空航天领域的高可靠时间敏感网络(TSN)交换机开发与验证方案。支持AFDX/TSN协议栈开发、确定性延迟验证及DO-254/DO-178C适航认证辅助。
虹科在汽车电子行业拥有超过10年的丰富经验。无论您是车辆总线技术的学习者、产品使用者,还是需要定制开发与测试的企业,我们都能为您提供专业的技术支持与服务。
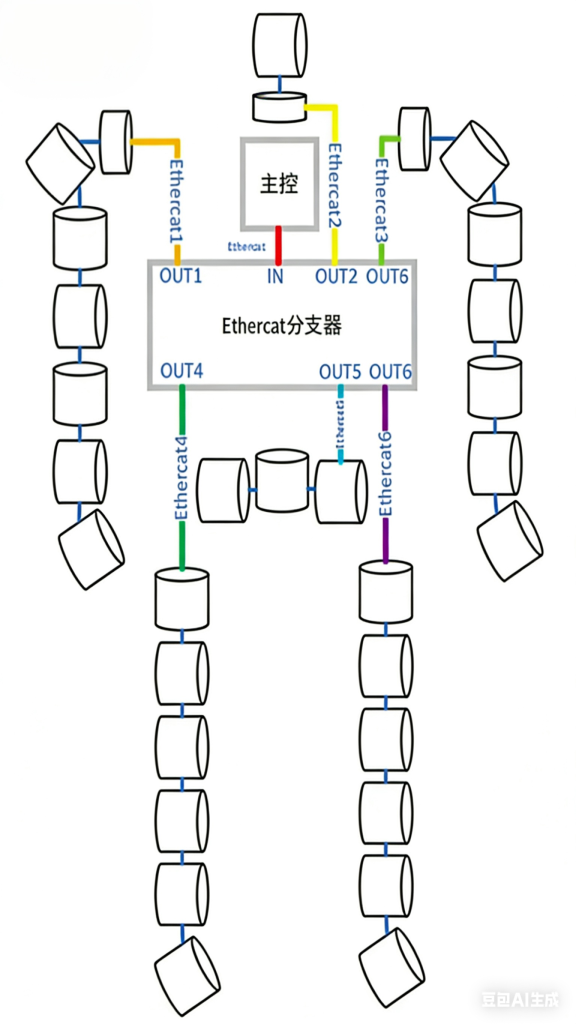
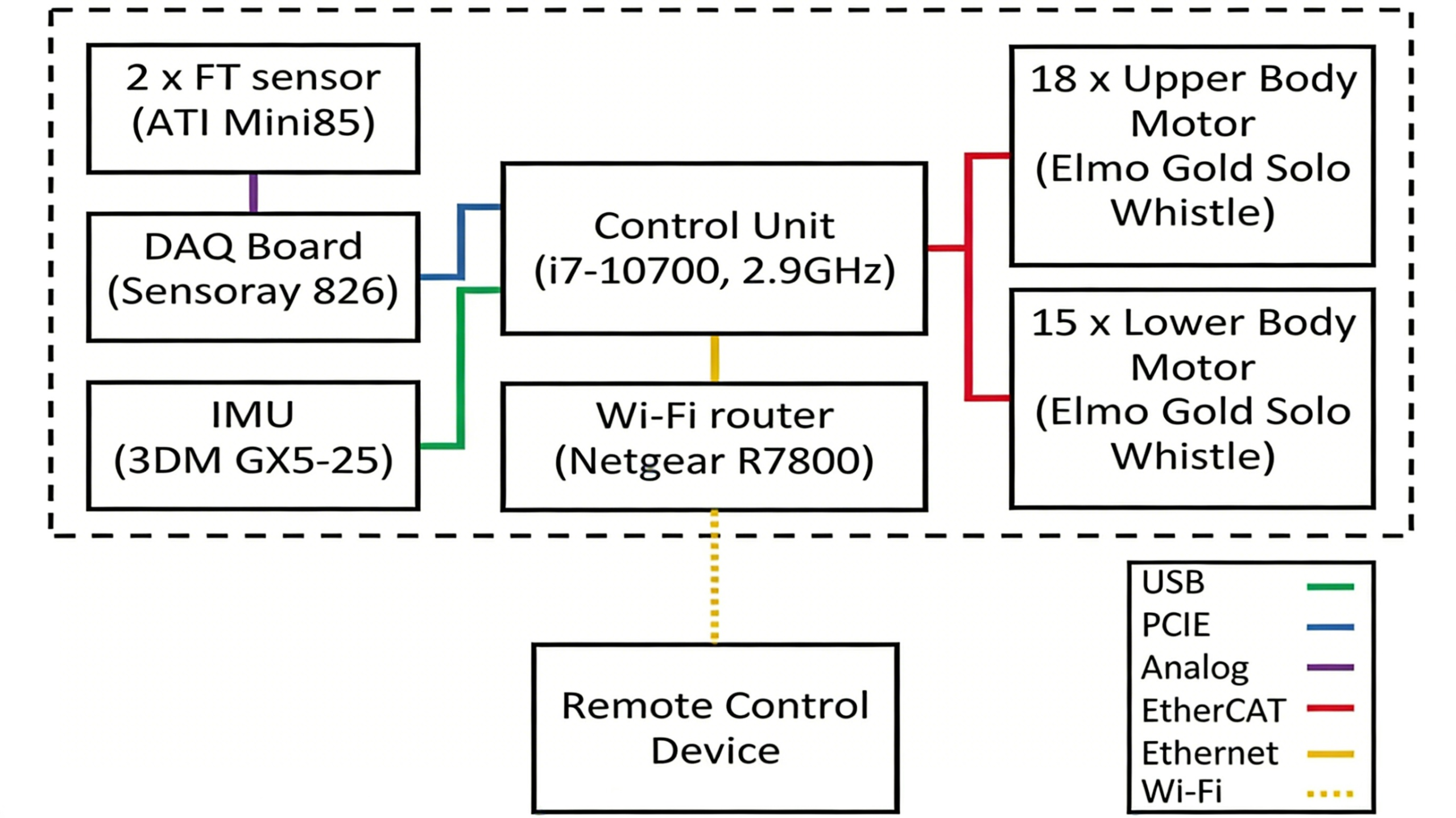
在人形机器人中,EtherCAT相当于遍布全身的周围神经系统,负责连接每一个关节、感知每一处传感器,并执行大脑发出的每一条精密指令。采用了EtherCAT实时高速以太网,可以保证控制系统和伺服关节之间的实时通信和数据同步,保证不同算法可以在高动态的工况下发挥出最好的效果。
关联客户:
技术背景
人形机器人各组件的通信系统必须是稳健、稳定、快速且严格周期性的。定义的 delta-T(即两次连续控制系统更新之间的时间间隔)的精度对机器人控制每个关节运动以精确满足所需运动的动态性能有显著影响。通过 EtherCAT 协议,可以实现一个具有高控制频率的稳定系统。
系统优势
owa5X 远程信息处理单元为 OEM 和系统集成商提供了开发完全定制的远程信息处理解决方案的灵活性。
虹科案例
虹科EtherCAT总线方案为人形机器人领域中设备开发、数据采集、运动控制、网络诊断提供全场景技术支持与解决方案。
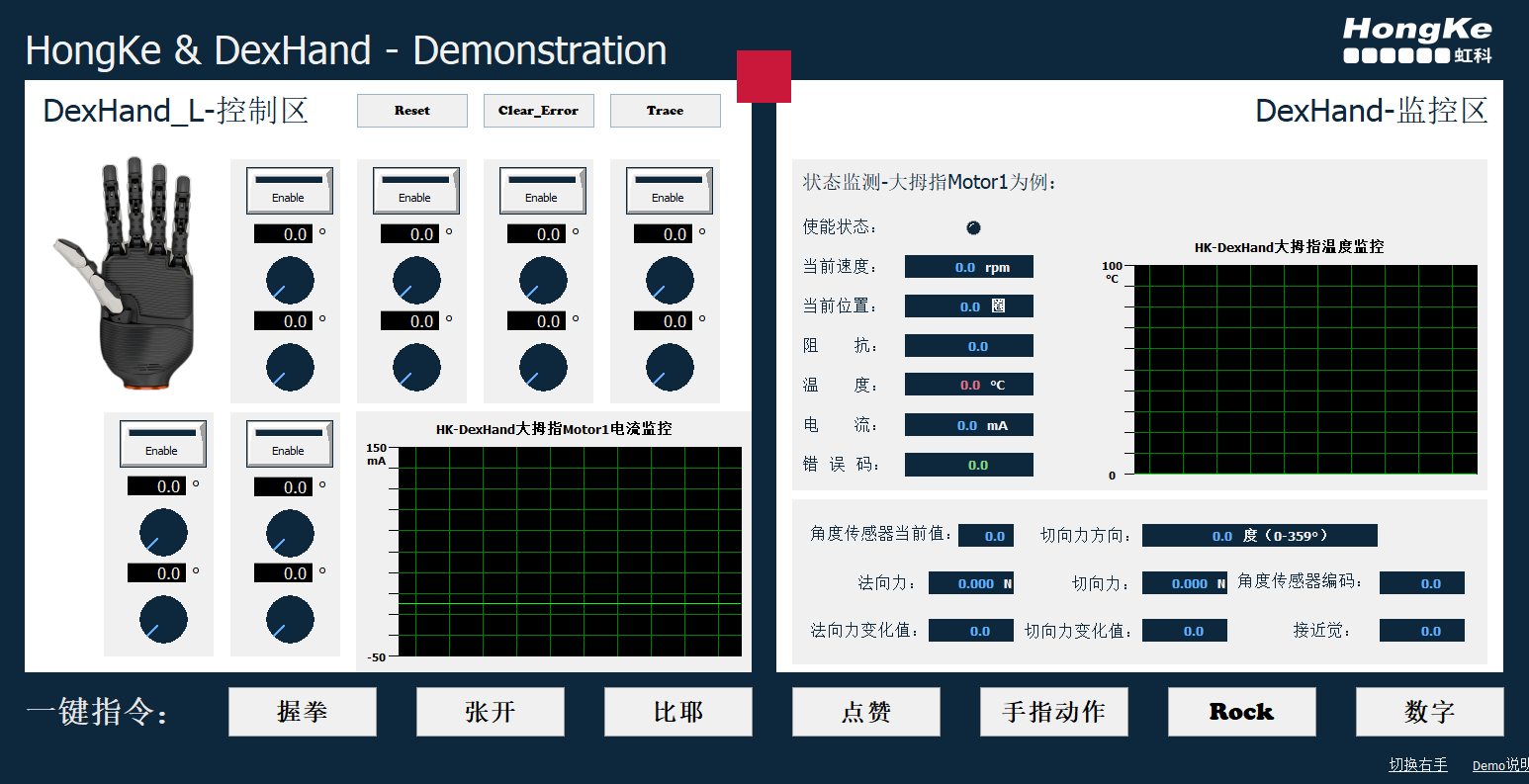
灵巧手作为仿人机器人的核心执行部件,需具备多自由度运动、力感知与精准操作能力,其应用场景覆盖工业分拣、医疗康复、科研实验等多个领域。虹科打造的基于CAN FD技术的测试方案,将高速通信、智能监控与精准控制深度融合,为灵巧手的研发、质检与应用提供了全维度的能力支撑。
虹科打造的这套基于CANFD技术的测试方案,将高速通信、智能监控与精准控制深度融合,为灵巧手的研发、质检与应用提供了全维度的能力支撑。方案以「硬件精准传输+软件智能解析」的专业技术架构,及全链路数据可追溯、测试流程可复现的严谨逻辑,既为灵巧手技术迭代提供量化支撑,更成为机器人产业标准化、精准化发展的技术标杆。