
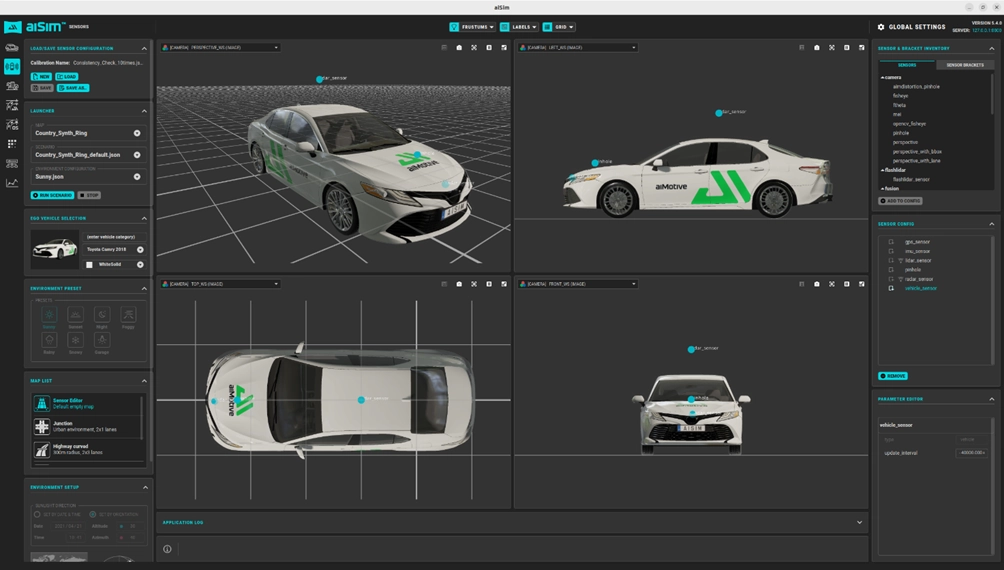

软件在环(SiL)测试方案
端到端仿真解决方案,支持在本地快速构建虚拟车辆与传感器系统,实现算法闭环验证与自动化测试,显著缩短开发周期。

硬件在环(HiL)测试方案
充分利用软件定义汽车的接口优势,跳过传统回注方式,将仿真工具通过中间件直接与算法、域控高效链接,显著缩短开发周期。
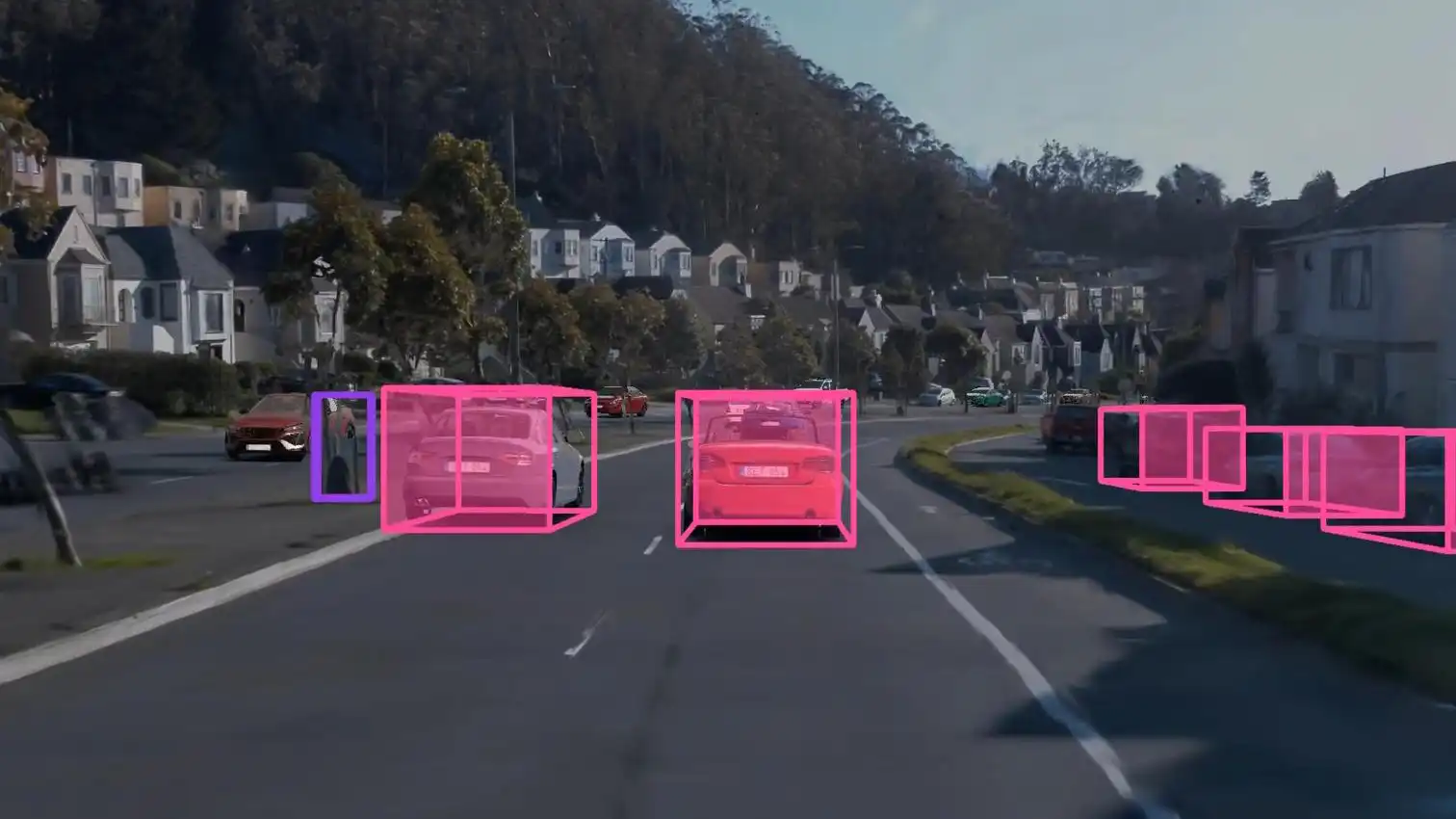
高保真自动驾驶场景重建方案
世界上第一款神经网络渲染仿真方案,融合神经重建与传统物理渲染,地图与环境的生成更具规模化,满足多样化测试需求。


{kind=link}